Když přemýšlíme o hadech, často si představujeme jejich ikonický, půvabný, vlnový pohyb-biologický zázrak, který se zdá, že vzdoruje tření a po celá desetiletí fascinuje zoology. To není jediný tah, který tyto prodloužené, bezhmenové stvoření zvládli. Je také známo, že šplhají na stromy, klouže vzduchem a navigují mimo jiné s nerovnoměrným terénem pomocí řady pohybových strategií, jako je přímočarý pohyb, periodický zvlnění a boční ucpání.
Zvláštní a dříve nehlášený manévr od Yellow Anacondas se nyní proklouzl do pozornosti fyziků-přechodného, neplanárního hnutí, které mladí hadi přijímají, aby se rychle posunuli vpřed, když byli ohroženi.
Výchozí bod tohoto pohybu byl dabován „s-start“ v Nedávná studie vedené vědci na IIT-Bombay a Harvard University a publikovali v Fyzika přírody.
S pomocí biofyzikálního modelu, který považoval had za aktivní elastickou tyč, vědci mapovali základní mechanické omezení a svalové točivé vzorce potřebné k provedení chůze. Zjistili, že tato forma lokomoce závisí na velikosti hadů, protože to vykazovalo pouze dítě a mladistvé Anacondas.
Raghunath ChelaKkot, docent na oddělení fyziky v IIT Bombay a spoluautor studie, uvedl, že tato forma pohybu se primárně používá jako úniková reakce, kde se hadi snaží spíše optimalizovat rychlost než šetřit energii. Na rozdíl od typického, dobře známého rovinného pohybu, kdy se hadi pohybují ve vlně podobném vzoru podél země, tento nově pozorovaný pohyb zahrnuje mladé hady, kteří ohýbají své tělo dovnitř a ven z roviny a částečně je zvedají z letadla.
Biofyzika pohyblivých hadů
Přestože nemají paže, nohy, křídla nebo ploutve, které pohánějí své tělo dopředu nebo dozadu, hadi se obejdou v pohodě, což z nich činí vynikající případovou studii v lokomotivě bez limble. Tento pohyb však nepřichází snadno, protože vyžaduje vnitřní a vnější struktury.
Dlouhé, štíhlé tělo hada je postaveno na flexibilní páteři složené ze stovek ostře zakřivených žeber, které pobíhají po celé jeho délce. Svaly připevněné k těmto žebrům se otočily a otočily se, aby zatlačily had dopředu.
Kůže je pokryta flexibilními měřítky na bázi keratinu. Na spodní straně, široké břišní stupnice poskytují přilnavost, zatímco menší, rozmanitější zadní stupnice pomáhají had pohybovat hladce po různých površích bez sklouznutí. Výzkum navrhl, aby se hadí schopnost pohybovat se, zejména na ploché půdě, se silně spoléhá na směrové tření vytvořené jeho stupnicí.
Vnitřní a externí systémy umožňují řadu odlišných stylů lokomoce: laterální zvlnění, kde vlny těla cestují stranou; přímočarý pohyb, který zahrnuje střídání svalové expanze a kontrakce podél břicha; koncerta lokomoce, kde se tělo skládá jako akordeon; a boční stravování, mimo rovinu, kde hadí zvedne části jeho těla, aby vytvořily válcování, spirálovité křivky.
Ale na rozdíl od mimo rovinu, který je stálý pohyb, který se pohybuje od hlavy k ocasu, je nově objevená chůze S-Start nestabilní a pulzní. Začíná to výbuchem svalové síly, která cestuje po těle a pak se spíše zastaví než se šíří.
Tento neočekávaný pohyb vyvolal dvě přesvědčivé otázky: Jak jsou schopni tento pohyb provést? A proč je toto chování pozorováno pouze u malých mladistvých Anacondas a ne u jiných druhů nebo větších jedinců? Odpovědi by mohly mít užitečné aplikace v robotice nebo biomechanice, řekl ChelaKkot.

Fyzika S-Starts
Aby se rozpadly hádanku, vědci provedli lokomotorické pokusy na 10 novorozených, pěti mladistvých a dvou dospělých zajatých žlutých anakondachch v USA. Hadi byli nuceni sestavit simulací externích hrozeb a vysokorychlostních videozáznamů sledovaly jejich pohyb.
Tým také vyvinul biofyzikální model, který s hadem považoval za elastickou tyč pohybující se na rovném povrchu. Tato tyčová reprezentace hada zachytila základní fyzické rysy-pasivní ohýbání a kroucení odporu, gravitační síly a třecí interakce se zemí-spolu s svalovými točivými momenty (rotačními silami) aplikovanými podél těla.
Pomocí matematického modelu vědci reprodukovali S-start v přítomnosti lokalizovaného tripletu svalového točivého momentu, kde dvě komponenty v rovině formovaly S-křivku S a jeden točivý moment ve středové kontaktní oblasti tlačil elastickou tyč na zem.
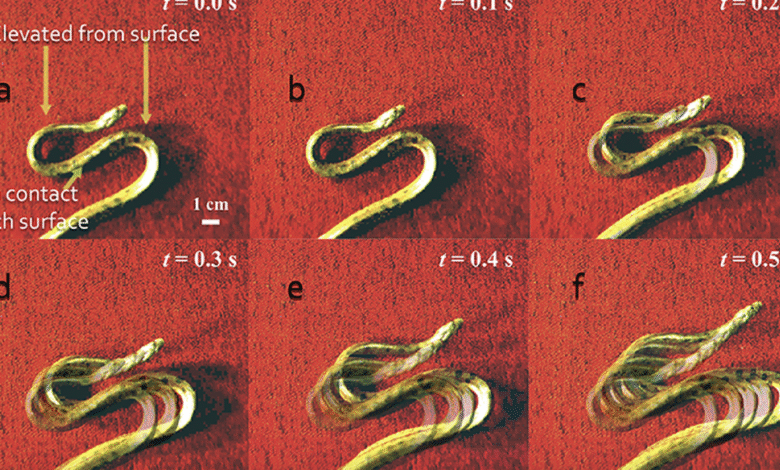
Video nahrávky dále potvrdily, že pro provedení pohybu had nejprve tvoří tvar S složený ze tří přímých sekcí spojených dvěma ostrými křivkami. Zakřivené části se poté zvedly ze země, zatímco vnější přímé řezy klouzaly dopředu, přičemž střední část zůstala stacionární. To způsobilo, že zakřivené oblasti cestují podél hadího těla a poháněly je dopředu.
Pouze mladé Anacondas
Během lokomotorických pokusů vědci poznamenali, že pouze novorozenci a mladiství provedli jedinečnou chůzi, nikoli dospělí. Numerické simulace hnutí hadů pomocí modelu naznačují, že S-start fungoval dobře pouze v určitém rozsahu škálované tělesné hmotnosti a svalového točivého momentu.
Protože chůze vyžaduje, aby had zvedl určité části těla ze země a přitiskl ostatní dolů, vytváří přetahování mezi svalovou silou a hmotností.
Chcete -li se zvednout, musí had překonat gravitaci, která se stává stále obtížnější se zvyšováním jeho hmotnosti. Jak hadi rostou, zvětšují se a těžší, ale nejsou silnější ve stejném poměru. Většina přidané hmotnosti pochází z kosti, ne svalu, takže větší hady s relativně menší svalovou hmotou na jednotku tělesné hmotnosti. Dospělí tedy postrádají poměr pevnosti k hmotnosti potřebné k provedení výtahu mimo rovinu rozhodujícího pro S-start.
Zkoumáním fyziky za lokomocí za Snake se vědci ocitli v evoluci odhalujícími vzory s kořeny. Zjistili, že při pravidelném aplikaci se točivý moment vytvořil známý boční pohyb.
„To naznačuje možnost, že S-Start je využíván jako stavební blok pro více limblessů, které zahrnují ohýbání těla mimo rovinu,“ řekl Chelakkot. „Kromě strany se zdá, že S-Start je součástí„ lasového pohybu “pozorovaného u hadů lezecích stromů. Všechna tato fakta naznačují možnou evoluční roli S-Start v neplanárních limblech.“

Hadi, chůze a roboti
Vědci vyjádřili přesvědčení, že poskytnutím přesných matematických opatření k reprodukci takového pohybu v umělých systémech mohou tyto studie pomoci zrychlit Inovace v měkké roboticenapodobující lokomoce Limbless. Jeden příklad: hadí podobné roboty, kteří mohou procházet velmi úzkými nebo omezenými prostory.
Tato zjištění přispívají k globálnímu porozumění lokomoce bez limmování napříč širokou škálou organismů, včetně nejen hadů, ale také červů, jako jsou žížaly a inchworms.
Chelakkot uvedl, že studium vysoce složitých živých organismů s všestrannými pohyby a držením těla otevírá možnosti expandovat a zpochybnit stávající elastické teorie.
„To nutí vědce, aby se podívali dále do toho, co jsou různé fyzické věci, které můžeme studovat, aby se přesunuli od porozumění jednoduchým tělům k složitějším tělům, jako jsou biologické systémy,“ dodal Chelakot.
Sanjukta Mondal je chemik-otočený-vědecký spisovatel se zkušenostmi při psaní populárních vědeckých článků a skriptů pro kanály STEM YouTube.