Lidská umělá inteligence MIT může ovládat jakýkoli robot a získat fyzické povědomí pouze pomocí jediné kamery
Vědci na MIT vyvinuli nový vize Umělá inteligence (Ai) Systém, který se může naučit, jak ovládat prakticky jakýkoli robot bez použití senzorů nebo předběžného.
Systém shromažďuje data o architektuře daného robota pomocí kamer, stejně jako lidé používají své oči, aby se o sobě dozvěděli, jak se pohybují.
To umožňuje řadiči AI vyvinout model sebeučení pro provoz jakéhokoli robota-v podstatě dává strojům lidský pocit fyzického sebevědomí.
Vědci dosáhli tohoto průlomu vytvořením nového ovládacího paradigmatu, které používá kamery k mapování video proudu „Visuomotor Jacobian Field“ robota, zobrazení viditelných 3D bodů stroje, na akční akcitory robota.
Model AI pak může předpovídat pohyby přesných motorů. To umožňuje přeměnit netradiční robotické architektury, jako je měkká robotika a architektory navržené s flexibilními materiály, na autonomní jednotky s pouhými několika hodinami tréninku.
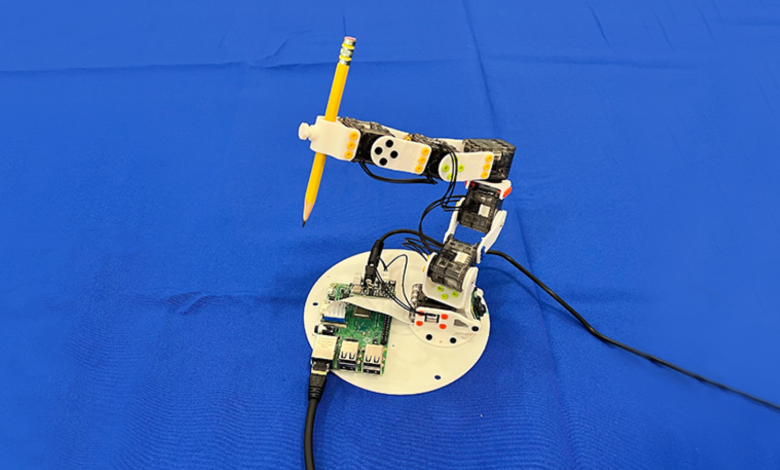
„Přemýšlejte o tom, jak se naučíte ovládat prsty: kroužíte se, pozorujete, přizpůsobíte se,“ vysvětlil Sizhe Lester LiPhD student na MIT Csail a vedoucí výzkumník na projektu, v a Tisková zpráva. „To je to, co náš systém dělá. Experimentuje s náhodnými akcími a zjišťováním, které ovládací prvky se pohybují, které části robota.“
Související: Vědci spálili, strčili a nakrájeli se na novou robotickou pokožku, která „cítí všechno“
Typická robotická řešení se spoléhají na Precision Engineering a vytvářejí stroje na přesné specifikace, které lze ovládat pomocí předškolených systémů. Mohou to vyžadovat drahé senzory a modely AI vyvinuté se stovkami nebo tisíci hodin jemného doladění, aby se předvídaly všechny možné permutaci pohybu. Například uchopení objektů s ručními přílohami zůstává obtížnou výzvou V arénách strojového inženýrství a kontroly systému AI.
Pochopení světa kolem vás
Naproti tomu použití řešení kamery „Jacobian Field“ naopak poskytuje nízkonákladové řešení pro výzvu automatizace robotických systémů.
Tým zveřejnil svá zjištění 25. června v časopise Příroda. V něm uvedli, že práce byla navržena tak, aby napodobovala metodu lidského mozku pro učení ovládat stroje.
Naše schopnost učit se a rekonstruovat 3D konfigurace a předpovídat pohyb jako funkci kontroly je odvozena pouze z vidění. Podle příspěvku „lidé se mohou naučit vybírat a umístit předměty během několika minut“ při ovládání robotů pomocí ovladače videoher a „jediné senzory, které požadujeme, jsou naše oči“.
Rámec systému byl vyvinut s použitím dvou až tří hodin videí s více zobrazeními robota provádějícího náhodně generované příkazy zachycené 12 videokamerami RGB-D.
Tento rámec se skládá ze dvou klíčových komponent. Prvním z nich je model hlubokého učení, který v podstatě umožňuje robotovi určit, kde jsou a jeho přílohy jsou v trojrozměrném prostoru. To mu umožňuje předpovídat, jak se jeho pozice změní při provádění specifických příkazů pohybu. Druhým je program strojového učení, který překládá příkazy obecného pohybu do kódu, kterému může robot pochopit a provádět.
Tým testoval nové paradigma školení a kontroly tím, že porovnával jeho účinnost proti tradičním metodám řízení založených na kameře. Jacobian Field Solution překročilo ty existující 2D kontrolní systémy v přesnosti – zejména když tým zavedl vizuální okluzi, která způsobila, že starší metody vstoupily do stavu selhání. Stroje používající metodu týmu však úspěšně vytvořily navigabilní 3D mapy, i když byly scény částečně uzavřeny náhodným nepořádkem.
Jakmile vědci vyvinuli rámec, byl pak aplikován na různé roboty s velmi různými architekturami. Konečným výsledkem byl kontrolní program, který nevyžaduje, aby žádný další lidský zásah trénoval a provozoval roboty pouze pomocí jediné videokamery.