Nový humanoidní robot „Transformer“ může ze zad vypustit tvarově měnící dron – sledujte ho v akci
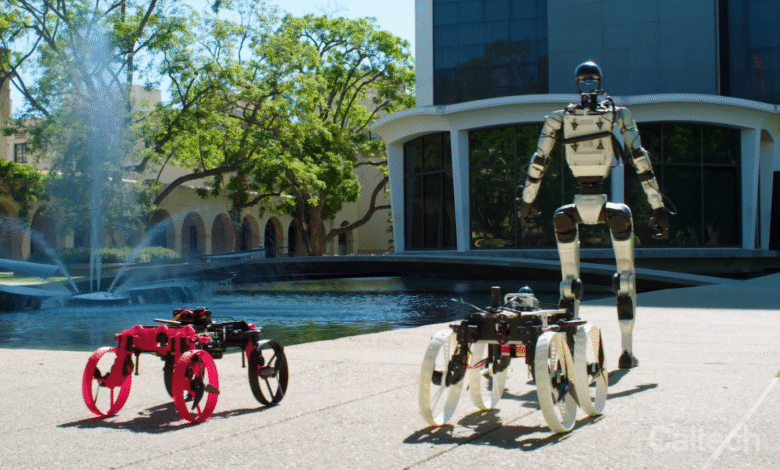
Inženýři Caltech vyvinuli multimodální robotický systém – humanoidního robota s transformujícím se dronem, který startuje ze zad.
Dron, nazvaný M4, sedí na zádech humanoidního robota, stroji Unitree G1, dokáže se transformovat – přepínat mezi jízdním a letovým režimem. Nemluvíme zde o Optimus Prime nebo Megatron; místo toho je robot vyhánějící drony spíše jako Soundwave, Decepticon, který ve své hrudi ukrýval různé mini transformátory, jako jsou drony.

Humanoid může chodit (ačkoli jsme viděli plynulejší pohyby) a může zdolávat schody a navigovat tam, kam poslal dron, i když mnohem pomalejším tempem.
„Právě teď mohou roboti létat, roboti řídit a roboti chodit. To vše je v určitých scénářích skvělé,“ Aaron Amesředitel CAST a profesor letectví a techniky na Caltech, řekl v a prohlášení. „Jak ale vezmeme tyto různé způsoby lokomoce a spojíme je do jednoho balíčku, abychom mohli vyniknout z výhod všech těchto a zároveň zmírnit pády, které každý z nich má?“
Výzva zde spočívala v tom, jak tým spojil různé roboty dohromady, aby se z nich stal jeden systém, ale přesto nabízely různé funkce. Dron byl postaven společností a CAST tým vedl Mory Gharib, zatímco Ames a jeho laboratoř konfigurovali humanoidního robota.

M4 je schopen překonfigurovat své tělo (transformovat se) do několika různých typů pohybu – dokáže vyhodnotit prostředí, do kterého potřebuje vstoupit, a automaticky vybrat nejúčinnější kombinace pohybu k manévrování. M4 se může válet na čtyřech kolech, přeměnit svá kola na rotory a létat, stát ve stylu surikaty na dvou kolech, „chodit“ pomocí svých kol jako nohou, používat dva rotory, které mu pomáhají rolovat do strmých svahů na dvou kolech, a také se jednoduše převrátit k cíli.
Klíčovým prvkem je schopnost M4 přeměnit své doplňky jako kola, nohy nebo trysky. Když M4 potřebuje letět, všechna čtyři kola se složí a vrtule zvednou robota ze země — nebo ze zadní části humanoidního robota, který se při nasazení M4 ohne dopředu.
Hlavním cílem spolupráce je učinit takové autonomní systémy bezpečnějšími a spolehlivějšími. Pokud budeme mít všude kolem sebe roboty, navrhoval Ames, je třeba zaměřit více práce na jejich spolehlivost.
„Uvažujeme o kontrole kritické z hlediska bezpečnosti, abychom se ujistili, že můžeme důvěřovat našim systémům, abychom se ujistili, že jsou bezpečné,“ uvedl Ames v prohlášení. „Máme několik projektů, které přesahují tento, které studují všechny tyto různé aspekty autonomie, a tyto problémy jsou opravdu velké. Tím, že máme tyto různé projekty a aspekty naší spolupráce, jsme schopni převzít tyto mnohem větší problémy a skutečně posunout autonomii kupředu podstatným a koordinovaným způsobem.“