

Vědci prokázali první úspěšný vertikální výtah humanoidního robota – hlavního kroku k létajícím robotům, které napodobují lidské schopnosti.
Nový robot, nazvaný IronCub Mk3, používá čtyři vrhky k dosažení svislého tahu, dva zabudované do jeho paží a dva v jetpack namontovaném na zádech.
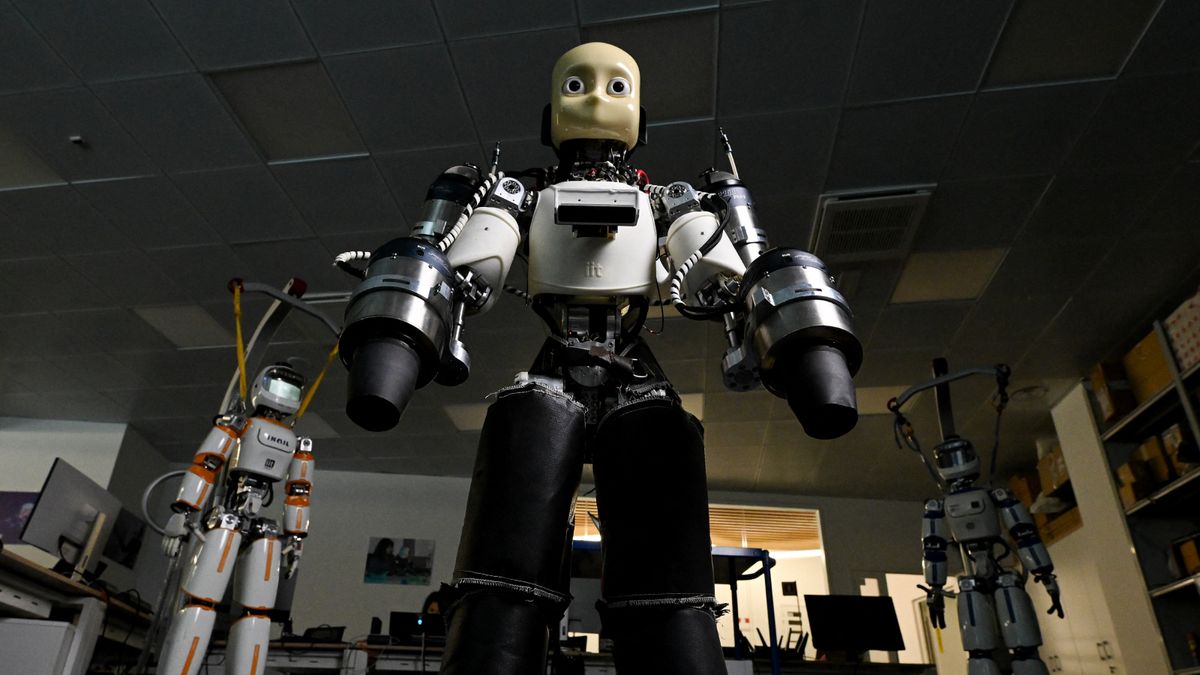
V záběrech vydaných Italský technologický institut (IIT) Na YouTube 18. června je robot s maskou držen z podvazku a poté se aktivuje, zvedne zhruba 20 palců (50 centimetrů) od země pomocí jeho trysků.
The ICUB Robot, na kterém je humanoid IIT založen na dítěti, je ve velikosti i vzhledu. Měří 3 stopy (1 metr) vysoký, zatímco váží 49 liber (22 kilogramů), přijímá dětské rozměry a obléká vysoce rozpoznatelnou hladkou a lesklou hlavu „dětské tváře“.
Poprvé zahájeno v roce 2009 konsorciem RobotCub na evropských univerzitách, je navrženo tak, aby byl testovaný pro výzkum lidského poznání a Umělá inteligence (Ai) a byl použit v nespočet projektů za posledních 16 let.
V odpovídající studii popisující robota, zveřejněného 1. června na arxiv Server PRISTRITT, inženýři IIT říkají, že jejich rozšířená verze robota je první takový letounový létající humanoidní robot navržený tak, aby vzlétl. Přidali tuto práci zdůrazňují nové možnosti, které létající, humanoidní robot představuje.
Související: Roboti: Fakta o strojích, které mohou chodit, mluvit nebo dělat úkoly, které lidé nemohou (nebo ne)
Na rozdíl od mnoha jiných robotických platforem, které se v současné době vyvíjejí, které se obvykle zaměřují výhradně na pozemní lokomoce a manipulaci, může přidat leteckou mobilitu připravit cestu pro pomoc při pátracích a záchranných misích, procházet zhroucené budovy a zaplavené oblasti nebo jiné terén nepřístupné lidem, uvedli vědci ve studii.
Kombinace letu se schopností interagovat s jeho prostředím by robot tohoto druhu mohl vyčistit zbytky a pomoci při lokalizaci nebo dokonce extrakci obětí.
Autoři studie také poukazují na to, že létající humanoidní robot by mohl provádět opravy na strukturách, které pro lidské bytosti obtížně přístupné, jako jsou spodní strany mostů. Mohli by být dokonce nasazeni v nebezpečném prostředí, kde lidé nemohou bezpečně fungovat, jako je místo jaderného nebo chemického úniku.
První létající robot poháněný na světě
IronCub je založen na platformě IIT ICUB3. Tento systém je navržen tak, aby umožnil robota napodobovat řadu lidských schopností, protože je vzdáleně ovládán operátorem na sobě virtuální realitu (VR) helmu podobný heads-up displej (HUD) a dalším specializovaným vybavením.
Pro vybavení ICUB k letu přidal tým montážní držáky s nosností, aby zajistil jetpack a novou titanovou páteř, aby podpořila jeho hmotnost. Protože předchozí verze IronCub měly problémy s odpálením výfukových plynů, byly do podvozku ICUB přidány tepelně odolné panely a kryty. Úhel náklonu thrusterů byl také upraven tak, aby pomohl se stabilitou za letu a úhlu výfukového plynu od těla robota.
Pro tuto verzi byly předloktí a ruce robota odstraněny, aby se vytvořily místo pro trysky namontované na paži, ale tým říká, že předloktí jsou stále plně kompatibilní a budou v pozdějších iteracích přečteny.
Aby se zajistilo, že podvozek zvládne stres vzletu a letu, provedl tým analýzu metody konečných prvků (FEM)-techniku řešení problémů, která se soustředí na rozbití struktury na menší propojené komponenty. Výsledkem je, že aplikovali axiální zatížení 750 Newtonů (trojnásobek špičkového tahu každé turbíny) na držáky proudových motorů.
Jednou z hlavních výzev dosažení letu v humanoidním robota tohoto typu je účtování všech kloubů a aktivačních bodů a jejich úpravy, stejně jako trysky, koordinovaným způsobem, takže robot neskončí létání mimo kurz nebo vzhůru nohama.
Inženýři to zvládli s tím, co se nazývá lineární parametr měnící se model prediktivní ovládání (MPC), komplexním letovému ovladači, který neustále počítají optimální polohu kloubu a proudové škrticí klapky.
Vědci rozsáhle testovali systém nejprve v počítačových simulacích předtím, než zahájili testy v reálném světě, z velké části kvůli bezpečnostním rizikům provozních tetterů s teplotami výfukových plynů vyšší než 112 stupňů Fahrenheitu (600 stupňů Celsia).
Po úspěšném prokázání uvedení na trh s předdefinovanou trajektorií a přesným sledováním tým nyní plánuje zaměřit své úsilí na zlepšení letového řadiče tak, aby zvládl externí poruchy, ke kterým může dojít během skutečného letového scénáře, jako je vítr nebo jiné nepříznivé počasí.



{kind=link}